Dernière modification de la publication :mars 15, 2022
Temps de lecture :7 min de lecture
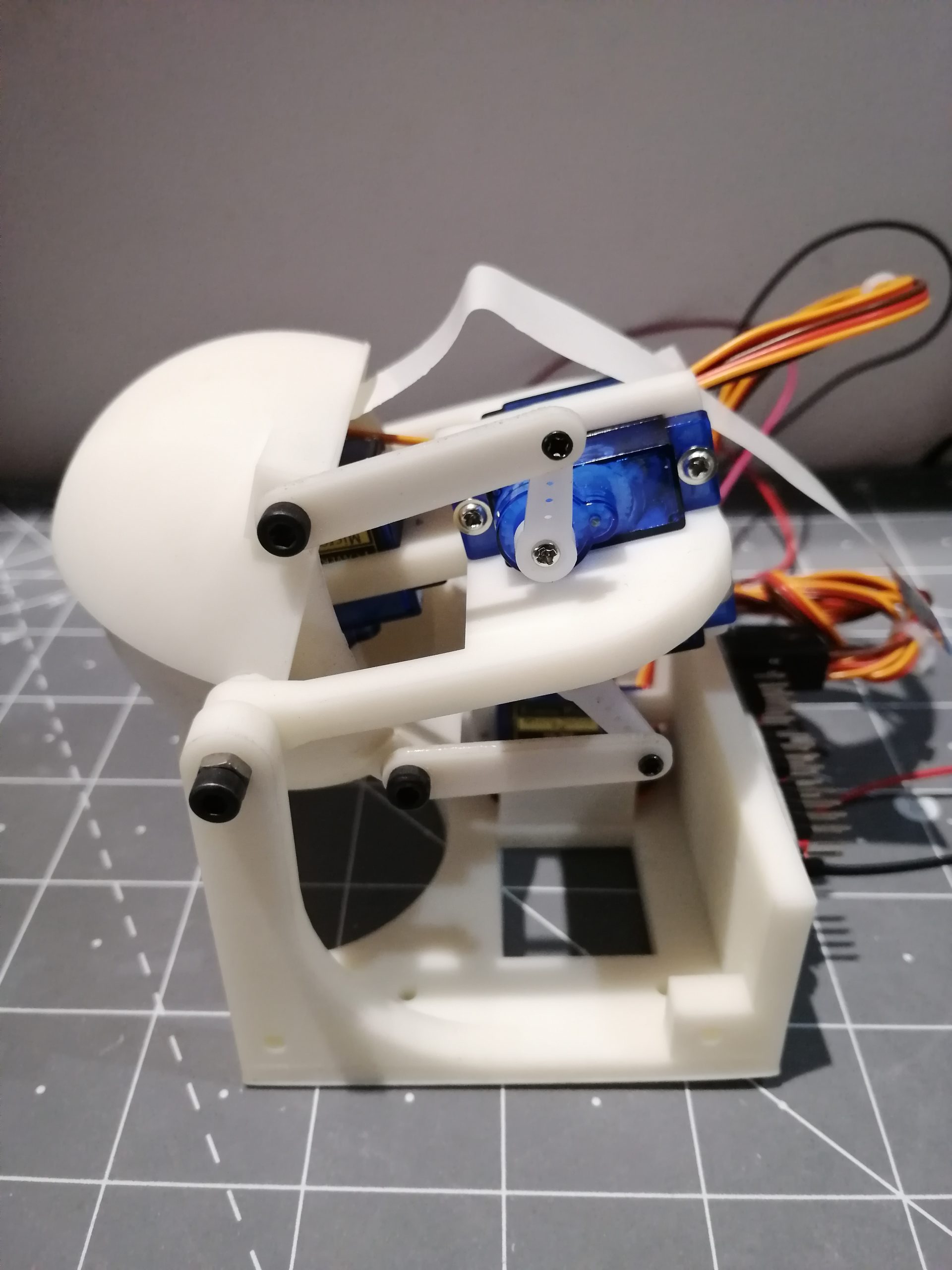
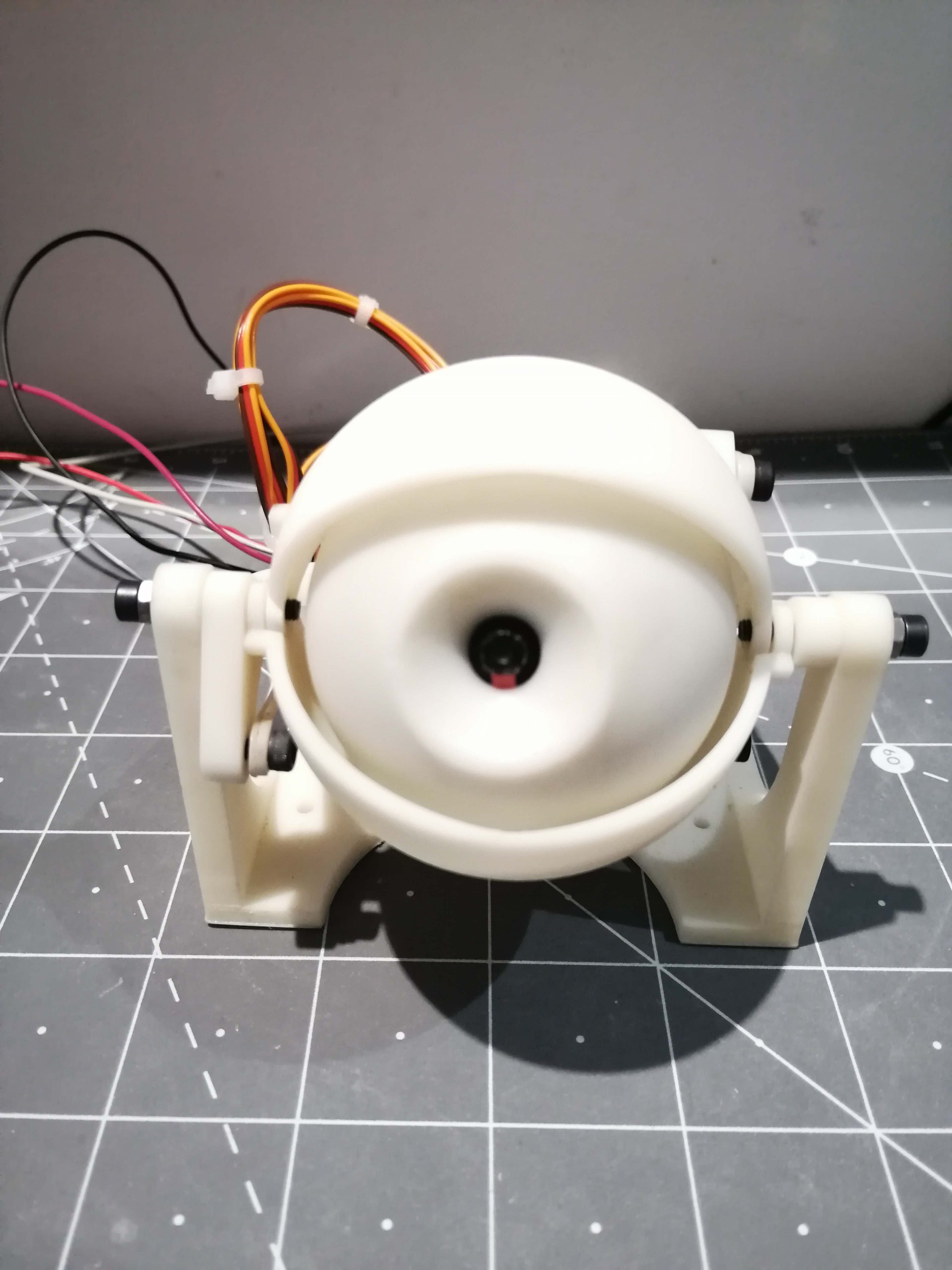
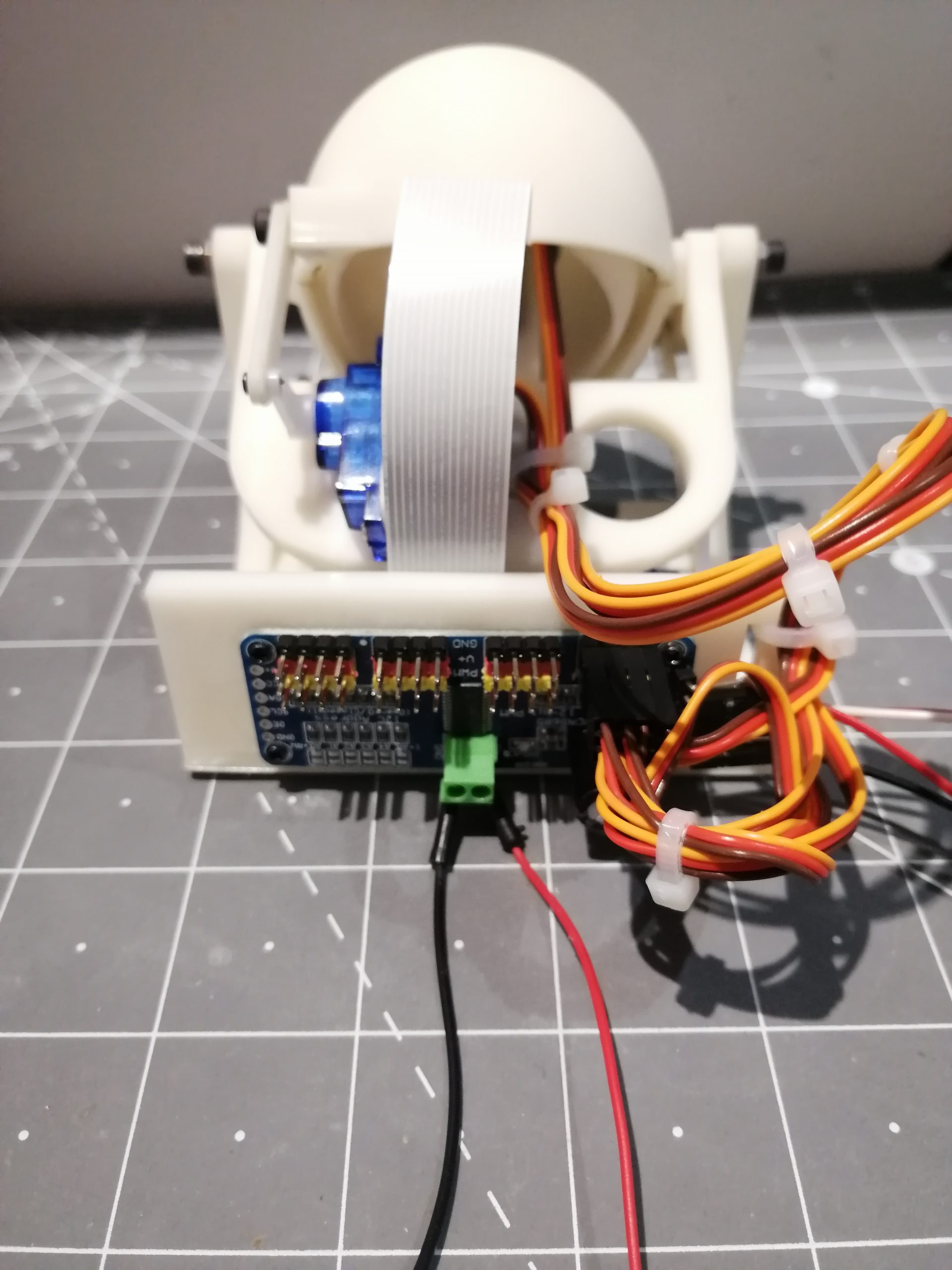
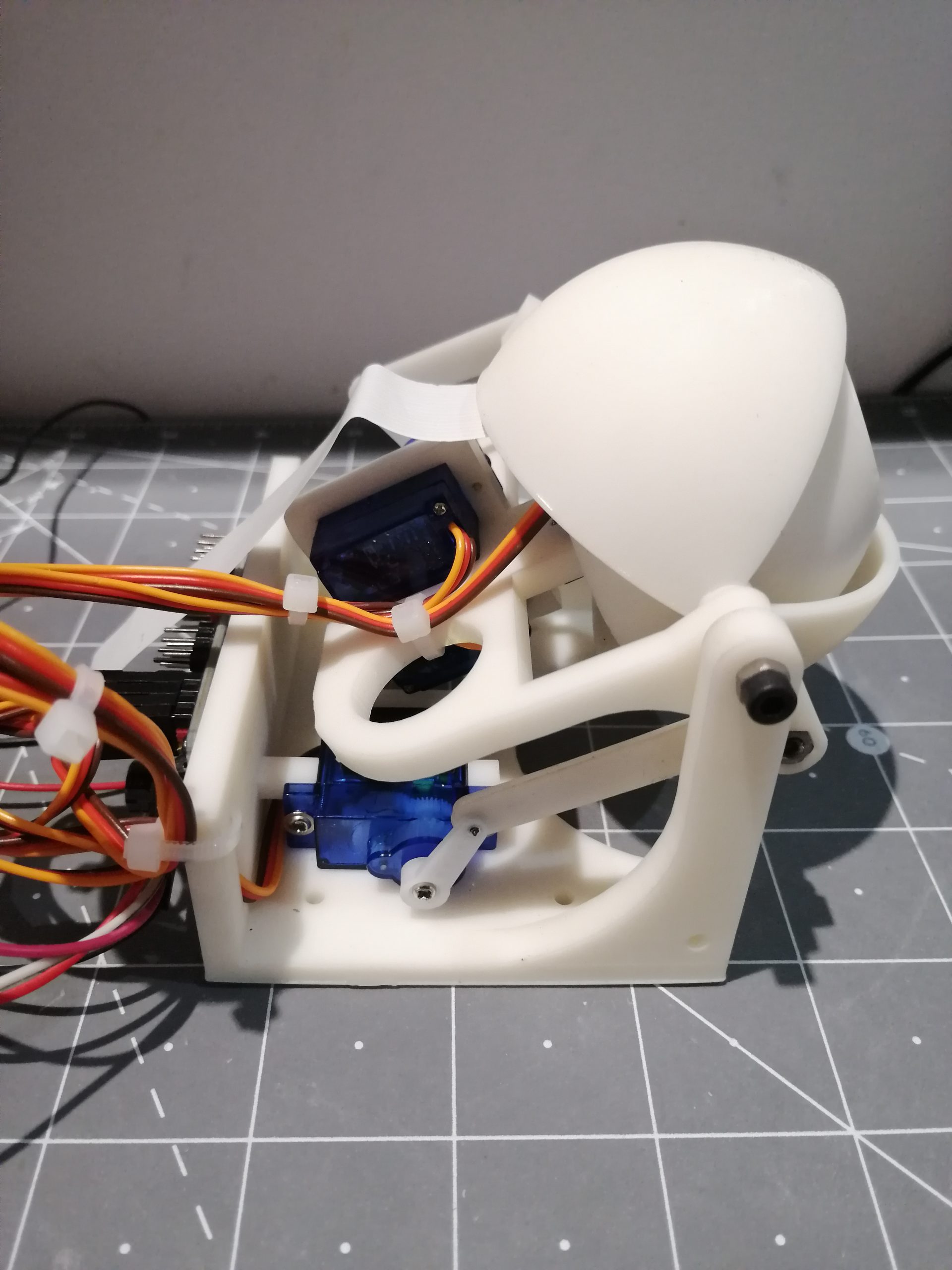
Œil animatronique (avec Pi caméra ) piloter par Arduino. Version oki et tester.
Description :
Fabrication œil animatronique à l’aide du microcontrôleur Arduino pour le pilotage des servos, avec intégration d’une PI caméra pour le suivi des objets par le futur.
La conception de l’œil avec la caméra embarquée a été faite de façon à ce que chaque assemblage dispose d’un écrou et d’une vis afin de rendre le montage fiable et fluide dans le temps.
Chaque piece a été faite pour qu’elle soit facilement imprimable sur une imprimante résine voir filament (test pas encore effectué).
Tous les fichiers sont disponibles ci-dessous en téléchargement.
Vidéo de démonstration :
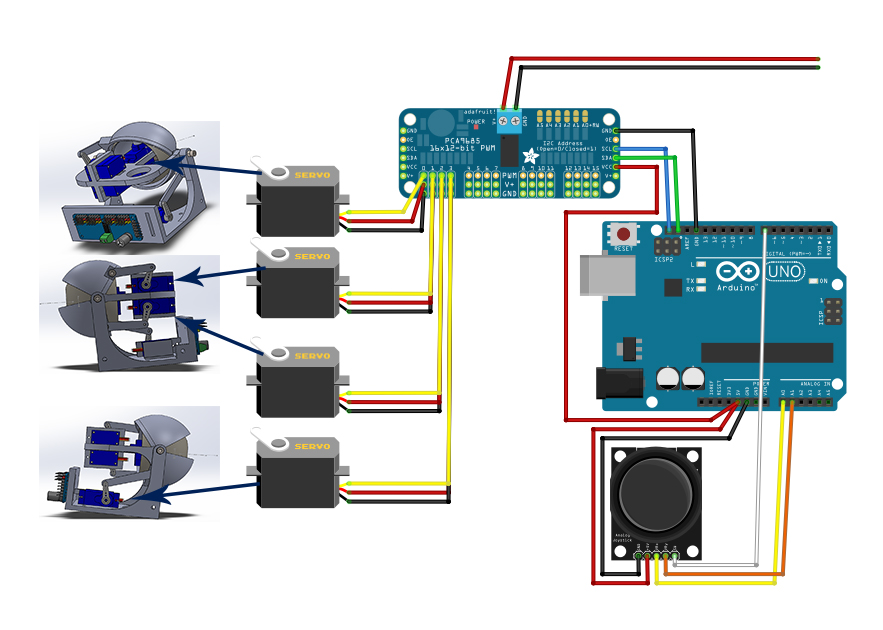
Composants nécessaires :
Arduino Uno
1 PCA9685
1 module joystick
Une Breadboard
Des fils de connexion
1 alimentation 5v
2 vis M3x20
3 vis M3x8
7 écrous hexagonal M3
1 imprimante 3d résine ( imprimante filament test pas encore effectué)
4 Servos Tower pro 9g sg90 (attention à la sortie des fils voir ci-dessous)
int pulseWidth(int angle) { int pulse_wide, analog_value; pulse_wide = map(angle, 0, 180, MIN_PULSE_WIDTH, MAX_PULSE_WIDTH); analog_value = int(float(pulse_wide) / 1000000 * FREQUENCY * 4096); return analog_value; }
void loop() { pwm.setPWM(0, 0, pulseWidth(90)); //Servo dans l'oeil direction horizontal pwm.setPWM(1, 0, pulseWidth(180)); //Servo Paupiere haut pwm.setPWM(2, 0, pulseWidth(0)); //Servo Paupiere bas pwm.setPWM(3, 0, pulseWidth(0)); //Servo direction vertical }
Codes :
//Servo dans l'oeil direction horizontal int servo0min = 55 ; int servo0max = 135 ; int valeurservo0 = 510; //Servo Paupiere haut int servo1min = 110 ; int servo1max = 180 ; int valeurservo1 = 310; //Servo Paupiere bas int servo2min = 0 ; int servo2max = 70 ; int valeurservo2 = 310; //Servo direction vertical int servo3min = 0 ; int servo3max = 80 ; int valeurservo3 = 0;