
Description :
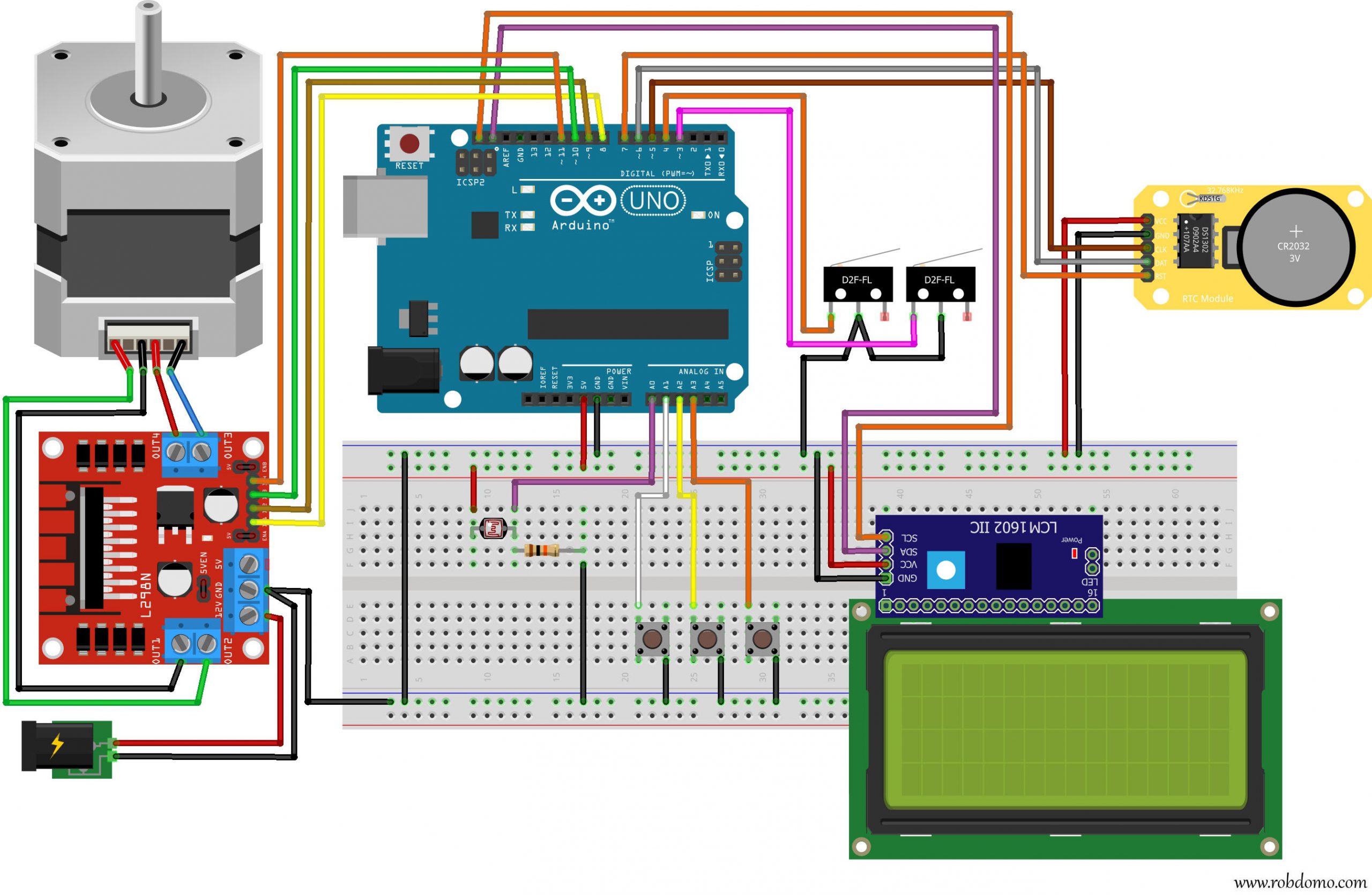
Version 4 : Avec moteur PAP
3 modes disponibles et entièrement configurables grâce aux boutons et de l’affichage LCD.
–Mode LDR : porte sera pilotée par le capteur de luminosité (LDR) avec option hysteresis.
–Mode Manuel : porte sera pilotée par 2 boutons manuellement.
–Mode Programmateur : programmer une heure ouverture / fermeture.
Options système :
-Réglage de l’heure directement avec les boutons.
-Mise en veille programmable de l’écran.
Tous les paramètres seront sauvegardés automatiquement sur la RAM en cas de coupure de courant.
Prérequis :
Matériel :
- 1 x Carte Arduino Uno
- 2 x Fin de course
- 1 x LDR photorésistance
- 1 x Résistance 10 KΩ
- 3 x Boutons
- 1 x Ecran LCD 20×4
- 1 x Module I2C
- 1 x Moteur Nema PAP
- 1 x L298N
- 1 x DS1302 Module RTC
- 1 x Alimentation 12v
- Fils de connexion
- 1 x Breadboard
Vidéo de démonstration :
Schéma de câblage :
Code :
//DS1302 //////////////////////////////////////////
#include <DS1302.h>
DS1302 rtc(7, 6, 5);
Time t;
DS1302_RAM ramBuffer;
//L298N ///////////////////////////////////////////
#include <Stepper.h>
const int stepsPerRevolution = 200;
// Initialise le moteur sur les broches 8 à 11
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
//LCD I2C /////////////////////////////////////////
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 20, 4);
//Gestion des entrées /////////////////////////////
int Bthaut = A1; //Pin du Bouton fleche haut
int Btbas = A2; //Pin du Bouton fleche bas
int Btselect = A3; //Pin du Bouton select
const int LDR = A0; //Pin du LDR
const int fdchaut = 3; //Pin du fin de course haut
const int fdcbas = 4; //Pin du fin de course bas
//Gestion des timers //////////////////////////////
unsigned long timerarduino;
unsigned long previousTime = 0;
unsigned long previousTimer1 = 0;
unsigned long Timer1;
unsigned long Timer1ON = 500; // Tps clignotement pendant saisie
unsigned long Timer1OFF = 500; // Tps clignotement pendant saisie
bool Timer1Etat;
unsigned long previousTimer2 = 0;
unsigned long Timer2;
unsigned long Timer2ON = 60000; // Utiliser pour decompte pour hysterisis
unsigned long previousTimer3 = 0;
unsigned long Timer3;
unsigned long Timer3ON = 1000; // Utiliser pour decompte pour hysterisis
unsigned long previousTimer4 = 0;
unsigned long Timer4;
unsigned long Timer4ON; // Utiliser pour la mise en veille
unsigned long previousTimer5 = 0;
unsigned long Timer5;
unsigned long Timer5ON = 2000; // Utiliser pour la saisie rapide
unsigned long previousTimer6 = 0;
unsigned long Timer6;
unsigned long Timer6ON = 500; // Utiliser pour la saisie rapide
int TpsAvouverture;
int TpsAvfermeture;
unsigned long TpsAvouverturesec;
unsigned long TpsAvfermeturesec;
//Variable Menu ///////////////////////////////////
int Accueil = 1; // Ecran Accueil
int Menu; // Menu Principal
int MenuMdm; // Menu Mode de Marche
int MenuPara; // Menu parametres
int MenuParaProg; // Menu parametres programmateur
int ParaProgHouv; // Menu parametrage Progr Heure ouverture
int ParaProgHferm; // Menu parametrage Progr Heure fermeture
int MenuParaLDR; // Menu parametres LDR
int ParaLDRouv; // Menu parametrage LDR ouverture
int ParaLDRferm; // Menu parametrage LDR fermeture
int ParaLDRhysteresis; // Menu parametrage LDR Hysteresis
int MenuSyst; // Menu systeme
int MenuSystVeille; // Menu systeme veille
int SystVeilleetat; // Menu systeme veille etat
int SystVeilleTpsactiv;// Menu systeme veille tps activation
int SystReglheure; // Menu systeme Reglage Heure
//Variables programme/////////////////////////////
boolean RefreshAffHeure;
boolean RefreshAffEtatTrappeManu;
int Thour;
int Tmin;
int Tsec;
boolean EtatBtselect;
boolean EtatBthaut ;
boolean EtatBtbas;
boolean Etattrappe = 0;
boolean Saisierapide;
boolean Pause; //Permet de mettre en pause certain affichage temps que moteur activer
int Modedemarche = 1; //Defini mode de marche (1 = Progr, 2 = LDR, 3 = Manu)
long V_MinOuv = 23; //Stock valeur Minute pour Progr Minute ouverture
long V_HeureOuv = 11; //Stock valeur Heure pour Progr Heure ouverture
long V_MinFerm = 23; //Stock valeur Minute pour Progr Minute fermeture
long V_HeureFerm = 23; //Stock valeur Heure pour Progr Heure fermeture
int V_LDRouv = 800; //Stock valeur LDR pour ouverture
int V_LDRferm = 700; //Stock valeur LDR pour fermeture
int V_Hysteresis = 20; //Stock valeur LDR pour Hysterisis
int V_Tsystheure; //Stock la valeur dans systeme Reglage heure avant SAV
int V_Tsystminute; //Stock la valeur dans systeme Reglage minute avant SAV
int V_Tsystseconde; //Stock la valeur dans systeme Reglage seconde avant SAV
int Veille = 0; // Ecran mise en veille
boolean Etatveille = 0;//Stock etat de la veille (actif ou inactif)
int V_TpsAvveille = 5; //Stock la valeur tps avant mise en veille en sec
byte customChar1[] = {B00000, B00000, B00001, B00001, B00001, B10110, B11000, B10000};
byte customChar2[] = {B00000, B11000, B00100, B10100, B00110, B01000, B00100, B00100};
byte customChar3[] = {B01000, B00111, B00001, B00011, B00000, B00000, B00000, B00000};
byte customChar4[] = {B01000, B10000, B10000, B11000, B00000, B00000, B00000, B00000};
void setup()
{
Serial.begin(9600);
//DS1302 //////////////////////////////////////////
rtc.halt(false);
// Réglez l'horloge en mode exécution et désactivez la protection en écriture
rtc.writeProtect(true);
rtc.setDOW(FRIDAY); // Set Day-of-Week to FRIDAY
rtc.setTime(19, 03, 0); // Set the time to 12:00:00 (24hr format)
rtc.setDate(22, 8, 2021); // Set the date to August 6th, 2010
//LCD I2C /////////////////////////////////////////
lcd.init(); lcd.backlight();
lcd.createChar(1, customChar1); lcd.createChar(2, customChar2);
lcd.createChar(3, customChar3); lcd.createChar(4, customChar4);
//Declaration des entrées /////////////////////////
pinMode(Bthaut, INPUT_PULLUP);
pinMode(Btbas, INPUT_PULLUP);
pinMode(Btselect, INPUT_PULLUP);
pinMode(fdchaut, INPUT_PULLUP);
pinMode(fdcbas, INPUT_PULLUP);
//L298N ///////////////////////////////////////////
myStepper.setSpeed(200); //Vitesse de rotation du moteur à 200
//Lecture et Récupération des valeurs de réglages dans RAM DS1302
ramBuffer = rtc.readBuffer();
Serial.println("Lecture de la RAM : ");
for (int i = 0; i < 31; i++)
{
Serial.print(" "); Serial.print(ramBuffer.cell[i]); Serial.print(" ");
}
Serial.println(" ");
LoadSav();
//Intro ///////////////////////////////////////////
Intro();
}
void loop()
{
int valeurLDR = analogRead(LDR);
timerarduino = millis();
//Ecran Accueil ///////////////////////////////////
switch (Accueil) {
case 0:
break;
case 1:
lcd.clear(); Accueil++;
break;
case 2:
lcd.setCursor(0, 1); lcd.print("Mode :");
lcd.setCursor(0, 2); lcd.print("Trappe :");
Accueil++;
break;
case 3:
if (Modedemarche == 1) {
Accueil = 4 ; RefreshAffHeure = 0;
}
else if (Modedemarche == 2) {
Accueil = 5; RefreshAffHeure = 0;
}
else if (Modedemarche == 3) {
Accueil = 6; RefreshAffHeure = 0;
}
break;
case 4:
lcd.setCursor(7, 1); lcd.print("Programmateur");
lcd.setCursor(0, 3); lcd.print("Ouv ");
if (V_HeureOuv < 10) {
lcd.setCursor(4, 3); lcd.print("0");
lcd.setCursor(5, 3); lcd.print(V_HeureOuv);
}
else {
lcd.setCursor(4, 3); lcd.print(V_HeureOuv);
}
lcd.setCursor(6, 3); lcd.print(":");
if (V_MinOuv < 10) {
lcd.setCursor(7, 3); lcd.print("0");
lcd.setCursor(8, 3); lcd.print(V_MinOuv);
}
else {
lcd.setCursor(7, 3);
lcd.print(V_MinOuv);
}
lcd.setCursor(11, 3); lcd.print("Fer");
if (V_HeureFerm < 10) {
lcd.setCursor(15, 3); lcd.print("0");
lcd.setCursor(16, 3); lcd.print(V_HeureFerm);
}
else {
lcd.setCursor(15, 3);
lcd.print(V_HeureFerm);
}
lcd.setCursor(17, 3); lcd.print(":");
if (V_MinFerm < 10) {
lcd.setCursor(18, 3); lcd.print("0");
lcd.setCursor(19, 3); lcd.print(V_MinFerm);
}
else {
lcd.setCursor(18, 3); lcd.print(V_MinFerm);
}
Accueil = 7;
break;
case 5:
lcd.setCursor(7, 1); lcd.print("LDR");
lcd.setCursor(0, 3); lcd.print("Ouv.: ");
lcd.setCursor(6, 3); lcd.print(V_LDRouv);
lcd.setCursor(11, 3); lcd.print("Fer.: ");
lcd.setCursor(17, 3); lcd.print(V_LDRferm);
Accueil = 7;
break;
case 6:
lcd.setCursor(7, 1); lcd.print("Manuel");
Accueil = 7;
break;
case 7:
if (Modedemarche == 2) {
if (Pause == 0) {
AffValeurLDR(valeurLDR); AffEtatTrappeLDR();
}
GestionTrappeLDR(); GestionTrappeAuto(); EcrVeille();
}
if (Modedemarche == 1) {
if (Pause == 0) {
GestionTrappeProg(); AffEtatTrappeProg();
}
GestionTrappeAuto(); EcrVeille();
}
if (Modedemarche == 3) {
GestionTrappeManu(); AffEtatTrappeManu(); EcrVeille();
}
AffHeure();
break;
default:
break;
}
//Menu principal///////////////////////////////////
switch (Menu) {
case 0:
break;
case 1:
lcd.clear(); Menu++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("------- Menu -------");
lcd.setCursor(0, 1); lcd.print("Mode de marche");
lcd.setCursor(0, 2); lcd.print("Parametres");
lcd.setCursor(0, 3); lcd.print("Systeme");
Menu++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1);
lcd.print (" ");
break;
case 6:
lcd.clear(); Menu = 8;
break;
case 7:
lcd.setCursor(0, 0); lcd.print("------- Menu -------");
lcd.setCursor(0, 1); lcd.print("Mode de marche");
lcd.setCursor(0, 2); lcd.print("Parametres");
lcd.setCursor(0, 3); lcd.print("Systeme");
Menu = 5;
break;
case 8:
lcd.clear(); Menu++;
break;
case 9:
lcd.setCursor(0, 0); lcd.print("------- Menu -------");
lcd.setCursor(0, 1); lcd.print("Retour");
Menu = 11;
break;
case 10:
Menu = 7;
break;
case 11:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
default:
break;
}
//Menu mode de marche//////////////////////////////
switch (MenuMdm) {
case 0:
break;
case 1:
lcd.clear(); MenuMdm++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("-- Mode de marche --");
lcd.setCursor(0, 1); lcd.print("Programmateur");
lcd.setCursor(0, 2); lcd.print("LDR");
lcd.setCursor(0, 3); lcd.print("Manuel");
MenuMdm++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
case 6:
lcd.clear();
MenuMdm = 8;
break;
case 7:
lcd.setCursor(0, 0); lcd.print("-- Mode de marche --");
lcd.setCursor(0, 1); lcd.print("Programmateur");
lcd.setCursor(0, 2); lcd.print("LDR");
lcd.setCursor(0, 3); lcd.print("Manuel");
MenuMdm = 5;
break;
case 8:
lcd.clear();
MenuMdm++;
break;
case 9:
lcd.setCursor(0, 0); lcd.print("-- Mode de marche --");
lcd.setCursor(0, 1); lcd.print("Retour");
MenuMdm = 11;
break;
case 10:
MenuMdm = 7;
break;
case 11:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
default:
break;
}
//Menu parametres /////////////////////////////////
switch (MenuPara) {
case 0:
break;
case 1:
lcd.clear(); MenuPara++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("---- Parametres ----");
lcd.setCursor(0, 1); lcd.print("Programmateur");
lcd.setCursor(0, 2); lcd.print("LDR");
lcd.setCursor(0, 3); lcd.print("Retour");
MenuPara++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
default:
break;
}
//Menu Parametres programmateur////////////////////
switch (MenuParaProg) {
case 0:
break;
case 1:
lcd.clear(); MenuParaProg++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("-- Programmateur ---");
lcd.setCursor(0, 1); lcd.print("Heure ouverture");
lcd.setCursor(0, 2); lcd.print("Heure fermeture");
lcd.setCursor(0, 3); lcd.print("Retour");
MenuParaProg++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
default:
break;
}
//Menu parametrage Progr Heure ouverture///////////
switch (ParaProgHouv) {
case 0:
break;
case 1:
lcd.clear(); ParaProgHouv++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("- Heure ouverture --");
lcd.setCursor(9, 2); lcd.print(":");
if (V_MinOuv < 10) {
lcd.setCursor(10, 2); lcd.print("0");
lcd.setCursor(11, 2); lcd.print(V_MinOuv);
}
else {
lcd.setCursor(10, 2); lcd.print(V_MinOuv);
}
ParaProgHouv++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_HeureOuv < 10) {
lcd.setCursor(7, 2); lcd.print("0");
lcd.setCursor(8, 2); lcd.print(V_HeureOuv);
}
else {
lcd.setCursor(7, 2); lcd.print(V_HeureOuv);
}
}
else {
lcd.setCursor(7, 2); lcd.print(" ");
}
}
break;
case 4:
if (V_HeureOuv < 10) {
lcd.setCursor(7, 2); lcd.print("0");
lcd.setCursor(8, 2); lcd.print(V_HeureOuv);
}
else {
lcd.setCursor(7, 2); lcd.print(V_HeureOuv);
}
previousTimer1 = timerarduino;
ParaProgHouv++;
break;
case 5:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_MinOuv < 10) {
lcd.setCursor(10, 2); lcd.print("0");
lcd.setCursor(11, 2); lcd.print(V_MinOuv);
}
else {
lcd.setCursor(10, 2); lcd.print(V_MinOuv);
}
}
else {
lcd.setCursor(10, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu parametrage Progr Heure fermeture///////////
switch (ParaProgHferm) {
case 0:
break;
case 1:
lcd.clear(); ParaProgHferm++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("- Heure fermeture --");
lcd.setCursor(9, 2); lcd.print(":");
if (V_MinFerm < 10) {
lcd.setCursor(10, 2); lcd.print("0");
lcd.setCursor(11, 2); lcd.print(V_MinFerm);
}
else {
lcd.setCursor(10, 2); lcd.print(V_MinFerm);
}
ParaProgHferm++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_HeureFerm < 10) {
lcd.setCursor(7, 2); lcd.print("0");
lcd.setCursor(8, 2); lcd.print(V_HeureFerm);
}
else {
lcd.setCursor(7, 2); lcd.print(V_HeureFerm);
}
}
else {
lcd.setCursor(7, 2); lcd.print(" ");
}
}
break;
case 4:
if (V_HeureFerm < 10) {
lcd.setCursor(7, 2); lcd.print("0");
lcd.setCursor(8, 2); lcd.print(V_HeureFerm);
}
else {
lcd.setCursor(7, 2); lcd.print(V_HeureFerm);
}
ParaProgHferm++;
break;
case 5:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_MinFerm < 10) {
lcd.setCursor(10, 2); lcd.print("0");
lcd.setCursor(11, 2); lcd.print(V_MinFerm);
}
else {
lcd.setCursor(10, 2); lcd.print(V_MinFerm);
}
}
else {
lcd.setCursor(10, 2); lcd.print(" ");
}
}
break;
case 6:
break;
default:
break;
}
//Menu parametres LDR /////////////////////////////
switch (MenuParaLDR) {
case 0:
break;
case 1:
lcd.clear(); MenuParaLDR++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("------- LDR --------");
lcd.setCursor(0, 1); lcd.print("Valeur ouverture");
lcd.setCursor(0, 2); lcd.print("Valeur fermeture");
lcd.setCursor(0, 3); lcd.print("Hysteresis");
MenuParaLDR++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
case 6:
lcd.clear();
MenuParaLDR = 8;
break;
case 7:
lcd.setCursor(0, 0); lcd.print("------- LDR --------");
lcd.setCursor(0, 1); lcd.print("Valeur ouverture");
lcd.setCursor(0, 2); lcd.print("Valeur fermeture");
lcd.setCursor(0, 3); lcd.print("Hysteresis");
MenuParaLDR = 5;
break;
case 8:
lcd.clear();
MenuParaLDR++;
break;
case 9:
lcd.setCursor(0, 0); lcd.print("------- LDR --------");
lcd.setCursor(0, 1); lcd.print("Retour");
MenuParaLDR = 11;
break;
case 10:
MenuParaLDR = 7;
break;
case 11:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
default:
break;
}
//Menu parametrage LDR ouverture///////////////////
switch (ParaLDRouv) {
case 0:
break;
case 1:
lcd.clear(); ParaLDRouv++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("-- LDR ouverture ---");
ParaLDRouv++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat || Saisierapide) {
if (V_LDRouv < 100 && V_LDRouv > 9) {
lcd.setCursor(8, 2); lcd.print(" ");
lcd.setCursor(9, 2); lcd.print(V_LDRouv);
}
else if (V_LDRouv < 10) {
lcd.setCursor(8, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(V_LDRouv);
}
else {
lcd.setCursor(8, 2); lcd.print(V_LDRouv);
}
}
else {
lcd.setCursor(8, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu parametrage LDR fermeture //////////////////
switch (ParaLDRferm) {
case 0:
break;
case 1:
lcd.clear(); ParaLDRferm++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("-- LDR fermeture ---");
ParaLDRferm++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino; Timer1Etat = !Timer1Etat;
if (Timer1Etat || Saisierapide) {
if (V_LDRferm < 100 && V_LDRferm > 9) {
lcd.setCursor(8, 2); lcd.print(" ");
lcd.setCursor(9, 2); lcd.print(V_LDRferm);
}
else if (V_LDRferm < 10) {
lcd.setCursor(8, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(V_LDRferm);
}
else {
lcd.setCursor(8, 2); lcd.print(V_LDRferm);
}
}
else {
lcd.setCursor(8, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu parametrage LDR Hysteresis /////////////////
switch (ParaLDRhysteresis) {
case 0:
break;
case 1:
lcd.clear(); ParaLDRhysteresis++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print ("-- LDR hysteresis --");
lcd.setCursor(11, 2); lcd.print ("min");
ParaLDRhysteresis++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat || Saisierapide) {
if (V_Hysteresis < 100 && V_Hysteresis > 9) {
lcd.setCursor(7, 2); lcd.print(" ");
lcd.setCursor(8, 2); lcd.print(V_Hysteresis);
}
else if (V_Hysteresis < 10) {
lcd.setCursor(7, 2); lcd.print(" ");
lcd.setCursor(9, 2); lcd.print(V_Hysteresis);
}
else {
lcd.setCursor(7, 2); lcd.print(V_Hysteresis);
}
}
else {
lcd.setCursor(7, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu Systeme ////////////////////////////////////
switch (MenuSyst) {
case 0:
break;
case 1:
lcd.clear(); MenuSyst++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("----- Systeme ------");
lcd.setCursor(0, 1); lcd.print("Reglage heure");
lcd.setCursor(0, 2); lcd.print("Gest. Veille");
lcd.setCursor(0, 3); lcd.print("Retour");
MenuSyst++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print (" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
default:
break;
}
//Menu systeme Reglage Heure //////////////////////
switch (SystReglheure) {
case 0:
break;
case 1:
lcd.clear();
V_Tsystheure = t.hour; V_Tsystminute = t.min; V_Tsystseconde = t.sec;
SystReglheure++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("-- Heure systeme ---");
lcd.setCursor(8, 2); lcd.print(":");
if (V_Tsystminute < 10) {
lcd.setCursor(9, 2); lcd.print("0");
lcd.setCursor(10, 2); lcd.print(V_Tsystminute);
}
else {
lcd.setCursor(9, 2); lcd.print(V_Tsystminute);
}
lcd.setCursor(11, 2); lcd.print(":");
if (V_Tsystseconde < 10) {
lcd.setCursor(12, 2); lcd.print("0");
lcd.setCursor(13, 2); lcd.print(V_Tsystseconde);
}
else {
lcd.setCursor(12, 2); lcd.print(V_Tsystseconde);
}
SystReglheure++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_Tsystheure < 10) {
lcd.setCursor(6, 2); lcd.print("0");
lcd.setCursor(7, 2); lcd.print(V_Tsystheure);
}
else {
lcd.setCursor(6, 2); lcd.print(V_Tsystheure);
}
}
else {
lcd.setCursor(6, 2); lcd.print(" ");
}
}
break;
case 4:
if (V_Tsystheure < 10) {
lcd.setCursor(6, 2); lcd.print("0");
lcd.setCursor(7, 2); lcd.print(V_Tsystheure);
}
else {
lcd.setCursor(6, 2); lcd.print(V_Tsystheure);
}
SystReglheure++;
break;
case 5:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_Tsystminute < 10) {
lcd.setCursor(9, 2); lcd.print("0");
lcd.setCursor(10, 2); lcd.print(V_Tsystminute);
}
else {
lcd.setCursor(9, 2); lcd.print(V_Tsystminute);
}
}
else {
lcd.setCursor(9, 2); lcd.print(" ");
}
}
break;
case 6:
if (V_Tsystminute < 10) {
lcd.setCursor(9, 2); lcd.print("0");
lcd.setCursor(10, 2); lcd.print(V_Tsystminute);
}
else {
lcd.setCursor(9, 2); lcd.print(V_Tsystminute);
}
SystReglheure++;
break;
case 7:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (V_Tsystseconde < 10) {
lcd.setCursor(12, 2); lcd.print("0");
lcd.setCursor(13, 2); lcd.print(V_Tsystseconde);
}
else {
lcd.setCursor(12, 2); lcd.print(V_Tsystseconde);
}
}
else {
lcd.setCursor(12, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu systeme veille /////////////////////////////
switch (MenuSystVeille) {
case 0:
break;
case 1:
lcd.clear(); MenuSystVeille++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("----- Veille ------");
lcd.setCursor(0, 1); lcd.print("Etat");
lcd.setCursor(0, 2); lcd.print("Tps av. activation");
lcd.setCursor(0, 3); lcd.print("Retour");
MenuSystVeille++;
break;
case 3:
lcd.setCursor(19, 3); lcd.print(" ");
lcd.setCursor(19, 1); lcd.print("<");
lcd.setCursor(19, 2); lcd.print(" ");
break;
case 4:
lcd.setCursor(19, 1); lcd.print(" ");
lcd.setCursor(19, 2); lcd.print("<");
lcd.setCursor(19, 3); lcd.print(" ");
break;
case 5:
lcd.setCursor(19, 2); lcd.print(" ");
lcd.setCursor(19, 3); lcd.print("<");
lcd.setCursor(19, 1); lcd.print(" ");
break;
default:
break;
}
//Menu systeme veille etat //////////////////
switch (SystVeilleetat) {
case 0:
break;
case 1:
lcd.clear(); SystVeilleetat++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print("--- Veille Etat ----");
SystVeilleetat++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
}
else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino; Timer1Etat = !Timer1Etat;
if (Timer1Etat) {
if (Etatveille) {
lcd.setCursor(6, 2); lcd.print(" Actif ");
}
else {
lcd.setCursor(6, 2); lcd.print("Inactif");
}
}
else {
lcd.setCursor(6, 2); lcd.print(" ");
}
}
break;
default:
break;
}
//Menu systeme veille Tps av. activation //////////
switch (SystVeilleTpsactiv) {
case 0:
break;
case 1:
lcd.clear(); SystVeilleTpsactiv++;
break;
case 2:
lcd.setCursor(0, 0); lcd.print(" Tps av. Act Veille ");
lcd.setCursor(11, 2); lcd.print("sec");
SystVeilleTpsactiv++;
break;
case 3:
if (Timer1Etat) {
Timer1 = Timer1OFF;
} else {
Timer1 = Timer1ON;
}
if ((timerarduino - previousTimer1) > Timer1) {
previousTimer1 = timerarduino;
Timer1Etat = !Timer1Etat;
if (Timer1Etat || Saisierapide) {
if (V_TpsAvveille < 100 && V_TpsAvveille > 9) {
lcd.setCursor(7, 2); lcd.print(" ");
lcd.setCursor(8, 2); lcd.print(V_TpsAvveille);
}
else if (V_TpsAvveille < 10) {
lcd.setCursor(7, 2); lcd.print(" ");
lcd.setCursor(9, 2); lcd.print(V_TpsAvveille);
}
else {
lcd.setCursor(7, 2); lcd.print(V_TpsAvveille);
}
}
else {
lcd.setCursor(7, 2); lcd.print (" ");
}
}
break;
default:
break;
}
///////////////////////////////////////////////////
//Gestion des boutons /////////////////////////////
if (digitalRead(Bthaut) == LOW && EtatBthaut == 0) {
EtatBthaut = 1; NavBthaut();
}
if (digitalRead(Btbas) == LOW && EtatBtbas == 0) {
EtatBtbas = 1; NavBtbas();
}
if (digitalRead(Btselect) == LOW && EtatBtselect == 0) {
EtatBtselect = 1; navmenuboutonselect();
}
if (digitalRead(Bthaut) == LOW && EtatBthaut == 1) {
if ((timerarduino - previousTimer5) > Timer5ON) {
NavBthautrapide(); Saisierapide = 1;
}
}
if (digitalRead(Btbas) == LOW && EtatBtbas == 1) {
if ((timerarduino - previousTimer5) > Timer5ON) {
NavBtbasrapide(); Saisierapide = 1;
}
}
if (digitalRead(Bthaut) == HIGH && digitalRead(Btbas) == HIGH) {
previousTimer5 = timerarduino; Saisierapide = 0;
}
if (digitalRead(Bthaut) == HIGH) {
EtatBthaut = 0;
}
if (digitalRead(Btbas) == HIGH) {
EtatBtbas = 0;
}
if (digitalRead(Btselect) == HIGH) {
EtatBtselect = 0;
}
}
//Gestion de la Trappe par Programmateur //////////
void GestionTrappeProg() {
unsigned long ouverturesec = (V_MinOuv * 60) + (V_HeureOuv * 3600);
unsigned long fermeturesec = (V_MinFerm * 60) + (V_HeureFerm * 3600);
t = rtc.getTime();
long hour = t.hour; long min = t.min; long sec = t.sec;
unsigned long heuresec = (min * 60) + (hour * 3600) + sec;
if (ouverturesec < fermeturesec && Modedemarche == 1) {
if (heuresec > ouverturesec && heuresec < fermeturesec) {
Etattrappe = 1;
}
else {
Etattrappe = 0;
}
}
if (ouverturesec > fermeturesec && Modedemarche == 1) {
if ((heuresec > ouverturesec && heuresec > fermeturesec) || (heuresec < ouverturesec && heuresec < fermeturesec)) {
Etattrappe = 1;
}
if (heuresec > fermeturesec && heuresec < ouverturesec) {
Etattrappe = 0;
}
}
}
//Gestion de la Trappe par le LDR /////////////////
void GestionTrappeLDR() {
int valeurLDR = analogRead(LDR);
if (valeurLDR > V_LDRouv && Etattrappe == 0 && Modedemarche == 2) {
if (TpsAvouverture == 0 && TpsAvouverturesec == 0) {
TpsAvouverture = V_Hysteresis; previousTimer2 = timerarduino;
TpsAvouverturesec = V_Hysteresis * 60; previousTimer3 = timerarduino;
}
else {
if ((timerarduino - previousTimer2) > Timer2ON) {
previousTimer2 = timerarduino; TpsAvouverture--;
}
if ((timerarduino - previousTimer3) > Timer3ON) {
previousTimer3 = timerarduino; TpsAvouverturesec--;
}
}
if (TpsAvouverturesec == 0) {
lcd.setCursor(9, 2); lcd.print(" ");
Etattrappe = 1;
}
}
else {
TpsAvouverture = 0; TpsAvouverturesec = 0;
}
if (valeurLDR < V_LDRferm && Etattrappe == 1 && Modedemarche == 2) {
if (TpsAvfermeture == 0 && TpsAvfermeturesec == 0) {
TpsAvfermeture = V_Hysteresis; previousTimer2 = timerarduino;
TpsAvfermeturesec = V_Hysteresis * 60; previousTimer3 = timerarduino;
}
else {
if ((timerarduino - previousTimer2) > Timer2ON) {
previousTimer2 = timerarduino; TpsAvfermeture--;
}
if ((timerarduino - previousTimer3) > Timer3ON) {
previousTimer3 = timerarduino; TpsAvfermeturesec--;
}
}
if (TpsAvfermeturesec == 0 ) {
lcd.setCursor(9, 2); lcd.print(" ");
Etattrappe = 0;
}
}
else {
TpsAvfermeture = 0; TpsAvfermeturesec = 0;
}
}
//Affichage Etat Trappe en Mode Manu /////
void AffEtatTrappeManu() {
if (digitalRead(Bthaut) == LOW && RefreshAffEtatTrappeManu == 0) {
lcd.setCursor(9, 2); lcd.print(" ");
RefreshAffEtatTrappeManu = 1;
}
if (digitalRead(Btbas) == LOW && RefreshAffEtatTrappeManu == 0) {
lcd.setCursor(9, 2); lcd.print(" ");
RefreshAffEtatTrappeManu = 1;
}
if (digitalRead(Bthaut) == HIGH && digitalRead(Btbas) == HIGH) {
RefreshAffEtatTrappeManu = 0;
}
if (digitalRead(fdchaut) == LOW && digitalRead(Btbas) == HIGH) {
lcd.setCursor(9, 2); lcd.print("Ouverte");
}
if (digitalRead(fdcbas) == LOW && digitalRead(Bthaut) == HIGH) {
lcd.setCursor(9, 2); lcd.print("Fermer ");
}
}
//Affichage Etat Trappe en Mode Programmateur /////
void AffEtatTrappeProg() {
if (Etattrappe == 1 && digitalRead(fdchaut) == LOW) {
lcd.setCursor(9, 2); lcd.print("Ouverte");
}
if (Etattrappe == 0 && digitalRead(fdcbas) == LOW) {
lcd.setCursor(9, 2); lcd.print("Fermer ");
}
}
//Affichage Etat Trappe en Mode LDR ///////////////
void AffEtatTrappeLDR() {
if (TpsAvfermeturesec == 0 && TpsAvouverturesec == 0 && TpsAvouverture == 0 && Etattrappe == 1 && TpsAvfermeture == 0 && digitalRead(fdchaut) == LOW) {
lcd.setCursor(9, 2); lcd.print("Ouverte ");
}
if (TpsAvfermeturesec == 0 && TpsAvouverturesec == 0 && TpsAvfermeture == 0 && Etattrappe == 0 && TpsAvouverture == 0 && digitalRead(fdcbas) == LOW) {
lcd.setCursor(9, 2); lcd.print("Fermer ");
}
if (TpsAvouverture > 1) {
if (TpsAvouverture < 100 && TpsAvouverture > 9) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(TpsAvouverture);
}
else if (TpsAvouverture < 10) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(11, 2); lcd.print(TpsAvouverture);
}
else {
lcd.setCursor(9, 2); lcd.print(TpsAvouverture);
}
lcd.setCursor(12, 2); lcd.print("m AvOuv.");
}
if (TpsAvouverturesec < 60 && TpsAvouverturesec != 0) {
if (TpsAvouverturesec < 100 && TpsAvouverturesec > 9) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(TpsAvouverturesec);
}
else if (TpsAvouverture < 10) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(11, 2); lcd.print(TpsAvouverturesec);
}
else {
lcd.setCursor(9, 2); lcd.print(TpsAvouverturesec);
}
lcd.setCursor(12, 2); lcd.print("s AvOuv.");
}
if (TpsAvfermeture > 1) {
lcd.setCursor(0, 2); lcd.print("Trappe : ");
if (TpsAvfermeture < 100 && TpsAvfermeture > 9) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(TpsAvfermeture);
}
else if (TpsAvfermeture < 10 && TpsAvfermeture > 0) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(11, 2); lcd.print(TpsAvfermeture);
}
else if (TpsAvfermeture < 1) {
lcd.setCursor(9, 2); lcd.print(" ");
}
else {
lcd.setCursor(9, 2); lcd.print(TpsAvfermeture);
}
lcd.setCursor(12, 2); lcd.print("m AvFer.");
}
if (TpsAvfermeturesec < 60 && TpsAvfermeturesec != 0) {
if (TpsAvfermeturesec < 100 && TpsAvfermeturesec > 9) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(10, 2); lcd.print(TpsAvfermeturesec);
}
else if (TpsAvfermeture < 10) {
lcd.setCursor(9, 2); lcd.print(" ");
lcd.setCursor(11, 2); lcd.print(TpsAvfermeturesec);
}
else {
lcd.setCursor(9, 2); lcd.print(TpsAvfermeturesec);
}
lcd.setCursor(12, 2); lcd.print("s AvOuv.");
}
}
//Affichage Valeur LDR ////////////////////////////
int AffValeurLDR (int valeurLDR) {
if (valeurLDR < 1000 && valeurLDR > 99) {
lcd.setCursor(16, 0); lcd.print(" ");
lcd.setCursor(17, 0); lcd.print(valeurLDR);
}
else if (valeurLDR < 100 && valeurLDR > 9) {
lcd.setCursor(16, 0); lcd.print(" ");
lcd.setCursor(18, 0); lcd.print(valeurLDR);
}
else if (valeurLDR < 10) {
lcd.setCursor(16, 0); lcd.print(" ");
lcd.setCursor(19, 0); lcd.print(valeurLDR);
}
else {
lcd.setCursor(16, 0); lcd.print(valeurLDR);
}
}
//Affichage de l'heure ////////////////////////////
void AffHeure() {
t = rtc.getTime();
if (RefreshAffHeure == 0) {
Thour = t.hour; Tmin = t.min; Tsec = t.sec;
lcd.setCursor(2, 0); lcd.print(":");
lcd.setCursor(5, 0); lcd.print(":");
}
if (Thour != t.hour || RefreshAffHeure == 0 ) {
Thour = t.hour;
if (t.hour < 10) {
lcd.setCursor(0, 0); lcd.print("0");
lcd.setCursor(1, 0); lcd.print(t.hour);
}
else {
lcd.setCursor(0, 0); lcd.print(t.hour);
}
}
if (Tmin != t.min || RefreshAffHeure == 0 ) {
Tmin = t.min;
if (t.min < 10) {
lcd.setCursor(3, 0); lcd.print("0");
lcd.setCursor(4, 0); lcd.print(t.min);
}
else {
lcd.setCursor(3, 0); lcd.print(t.min);
}
}
if (Tsec != t.sec || RefreshAffHeure == 0 ) {
Tsec = t.sec;
if (t.sec < 10) {
lcd.setCursor(6, 0); lcd.print("0");
lcd.setCursor(7, 0); lcd.print(t.sec);
}
else {
lcd.setCursor(6, 0); lcd.print(t.sec);
}
RefreshAffHeure = 1;
}
}
//Gestion de la Trappe en Mode Manu ///////////////
void GestionTrappeManu() {
if (Modedemarche == 3 && Accueil == 7 && EtatBthaut == 1 && digitalRead(fdchaut) == HIGH) {
Pause = 1; myStepper.step(1);
}
else if (Modedemarche == 3 && Accueil == 7 && EtatBtbas == 1 && digitalRead(fdcbas) == HIGH) {
Pause = 1; myStepper.step(-1);
}
else {
Moteurrepos ();
Pause = 0;
}
if (digitalRead(fdchaut) == LOW) {
Etattrappe = 1;
}
if (digitalRead(fdcbas) == LOW) {
Etattrappe = 0;
}
}
//Gestion de la Trappe en Mode Auto ///////////////
void GestionTrappeAuto() {
if ((Modedemarche == 1 || Modedemarche == 2) && Etattrappe == 1 && digitalRead(fdchaut) == HIGH) {
Pause = 1; myStepper.step(1);
}
else if ((Modedemarche == 1 || Modedemarche == 2) && Etattrappe == 0 && digitalRead(fdcbas) == HIGH) {
Pause = 1; myStepper.step(-1);
}
else {
Moteurrepos ();
Pause = 0;
}
}
//Mise au repos moteur PAP ////////////////////////
void Moteurrepos () {
digitalWrite (8, LOW); digitalWrite (9, LOW);
digitalWrite (10, LOW); digitalWrite (11, LOW);
}
//Sauvegarde Heures sur DS1302 ////////////////////
void SavHeure () {
rtc.writeProtect(false);
rtc.setTime(V_Tsystheure, V_Tsystminute, V_Tsystseconde);
delay(50);
rtc.writeProtect(true);
}
//Sauvegarde sur RAM DS1302 ///////////////////////
void Sav () {
rtc.writeProtect(false);
byte v_1LDRouverture = lowByte(V_LDRouv); byte v_2LDRouverture = highByte(V_LDRouv);
byte v_1LDRfermeture = lowByte(V_LDRferm); byte v_2LDRfermeture = highByte(V_LDRferm);
byte v_1LDRhysteresis = lowByte(V_Hysteresis); byte v_2LDRhysteresis = highByte(V_Hysteresis);
byte v_1V_TpsAvveille = lowByte(V_TpsAvveille); byte v_2V_TpsAvveille = highByte(V_TpsAvveille);
ramBuffer.cell[0] = 99; ramBuffer.cell[1] = Modedemarche;
ramBuffer.cell[2] = V_HeureOuv; ramBuffer.cell[3] = V_MinOuv;
ramBuffer.cell[4] = V_HeureFerm; ramBuffer.cell[5] = V_MinFerm;
ramBuffer.cell[6] = v_1LDRouverture; ramBuffer.cell[7] = v_2LDRouverture;
ramBuffer.cell[8] = v_1LDRfermeture; ramBuffer.cell[9] = v_2LDRfermeture;
ramBuffer.cell[10] = v_1LDRhysteresis; ramBuffer.cell[11] = v_2LDRhysteresis;
ramBuffer.cell[12] = Etattrappe; ramBuffer.cell[13] = Etatveille;
ramBuffer.cell[14] = v_1V_TpsAvveille; ramBuffer.cell[15] = v_2V_TpsAvveille;
rtc.writeBuffer(ramBuffer);
ramBuffer = rtc.readBuffer();
rtc.writeProtect(true);
Serial.println("Sauvegarde sur RAM");
for (int i = 0; i < 31; i++)
{
Serial.print(" "); Serial.print(ramBuffer.cell[i]); Serial.print(" ");
}
Serial.println(" ");
}
//Chargement de la RAM DS1302 /////////////////////
void LoadSav() {
if (ramBuffer.cell[0] == 99) {
Modedemarche = ramBuffer.cell[1]; V_HeureOuv = ramBuffer.cell[2];
V_MinOuv = ramBuffer.cell[3]; V_HeureFerm = ramBuffer.cell[4];
V_MinFerm = ramBuffer.cell[5];
byte V_1LDRouv = ramBuffer.cell[6]; byte V_2LDRouv = ramBuffer.cell[7];
byte V_1LDRferm = ramBuffer.cell[8]; byte V_2LDRferm = ramBuffer.cell[9];
byte V_1Hysteresis = ramBuffer.cell[10]; byte V_2Hysteresis = ramBuffer.cell[11];
Etattrappe = ramBuffer.cell[12]; Etatveille = ramBuffer.cell[13];
byte V_1V_TpsAvveille = ramBuffer.cell[14]; byte V_2V_TpsAvveille = ramBuffer.cell[15];
V_LDRouv = word(V_2LDRouv, V_1LDRouv); V_LDRferm = word(V_2LDRferm, V_1LDRferm);
V_Hysteresis = word(V_2Hysteresis, V_1Hysteresis);
V_TpsAvveille = word(V_2V_TpsAvveille, V_1V_TpsAvveille);
}
}
//Gestion Navigation Bouton Bas ///////////////////
void NavBtbas() {
if (Menu > 0) {
if (Menu > 10) {
Menu = 1;
} else {
Menu++;
}
}
if (MenuMdm > 0) {
if (MenuMdm > 10) {
MenuMdm = 1;
} else {
MenuMdm++;
}
}
if (MenuPara > 0) {
if (MenuPara > 4) {
MenuPara = 3;
} else {
MenuPara++;
}
}
if (MenuParaProg > 0) {
if (MenuParaProg > 4) {
MenuParaProg = 3;
} else {
MenuParaProg++;
}
}
if (MenuParaLDR > 0) {
if (MenuParaLDR > 10) {
MenuParaLDR = 1;
} else {
MenuParaLDR++;
}
}
if (MenuSyst > 0) {
if (MenuSyst > 4) {
MenuSyst = 2;
} else {
MenuSyst++;
}
}
if (MenuSystVeille > 0) {
if (MenuSystVeille > 4) {
MenuSystVeille = 2;
} else {
MenuSystVeille++;
}
}
if (SystVeilleetat == 3) {
Etatveille = !Etatveille;
}
if (SystVeilleTpsactiv == 3) {
if (V_TpsAvveille < 4) {
V_TpsAvveille = 180;
} else {
V_TpsAvveille--;
}
}
if (ParaProgHouv == 3) {
if (V_HeureOuv < 1) {
V_HeureOuv = 23;
} else {
V_HeureOuv--;
}
}
if (ParaProgHouv == 5) {
if (V_MinOuv < 1) {
V_MinOuv = 59;
} else {
V_MinOuv--;
}
}
if (ParaProgHferm == 3) {
if (V_HeureFerm < 1) {
V_HeureFerm = 23;
} else {
V_HeureFerm--;
}
}
if (ParaProgHferm == 5) {
if (V_MinFerm < 1) {
V_MinFerm = 59;
} else {
V_MinFerm--;
}
}
if (ParaLDRouv == 3) {
if (V_LDRouv < 1) {
V_LDRouv = 999;
} else {
V_LDRouv--;
}
}
if (ParaLDRferm == 3) {
if (V_LDRferm < 1) {
V_LDRferm = 999;
} else {
V_LDRferm--;
}
}
if (ParaLDRhysteresis == 3) {
if (V_Hysteresis < 1) {
V_Hysteresis = 999;
} else {
V_Hysteresis--;
}
}
if (SystReglheure == 3) {
if (V_Tsystheure < 1) {
V_Tsystheure = 23;
} else {
V_Tsystheure--;
}
}
if (SystReglheure == 5) {
if (V_Tsystminute < 1) {
V_Tsystminute = 59;
} else {
V_Tsystminute--;
}
}
if (SystReglheure == 7) {
if (V_Tsystseconde < 1) {
V_Tsystseconde = 59;
} else {
V_Tsystseconde--;
}
}
}
//Gestion Navigation Bouton HAUT ///////////////////
void NavBthaut() {
if (Menu > 0) {
if (Menu == 3) {
Menu = 8;
} else {
Menu--;
}
}
if (MenuMdm > 0) {
if (MenuMdm == 3) {
MenuMdm = 8;
} else {
MenuMdm--;
}
}
if (MenuPara > 0) {
if (MenuPara == 3) {
MenuPara = 5;
} else {
MenuPara--;
}
}
if (MenuParaProg > 0) {
if (MenuParaProg == 3) {
MenuParaProg = 5;
} else {
MenuParaProg--;
}
}
if (MenuParaLDR > 0) {
if (MenuParaLDR == 3) {
MenuParaLDR = 8;
} else {
MenuParaLDR--;
}
}
if (MenuSyst > 0) {
if (MenuSyst == 3) {
MenuSyst = 5;
} else {
MenuSyst--;
}
}
if (MenuSystVeille > 0) {
if (MenuSystVeille == 3) {
MenuSystVeille = 5;
} else {
MenuSystVeille--;
}
}
if (SystVeilleetat == 3) {
Etatveille = !Etatveille;
}
if (SystVeilleTpsactiv == 3) {
if (V_TpsAvveille > 179) {
V_TpsAvveille = 3;
} else {
V_TpsAvveille++;
}
}
if (ParaProgHouv == 3) {
if (V_HeureOuv > 22) {
V_HeureOuv = 0;
} else {
V_HeureOuv++;
}
}
if (ParaProgHouv == 5) {
if (V_MinOuv > 58) {
V_MinOuv = 0;
} else {
V_MinOuv++;
}
}
if (ParaProgHferm == 3) {
if (V_HeureFerm > 22) {
V_HeureFerm = 0;
} else {
V_HeureFerm++;
}
}
if (ParaProgHferm == 5) {
if (V_MinFerm > 58) {
V_MinFerm = 0;
} else {
V_MinFerm++;
}
}
if (ParaLDRouv == 3) {
if (V_LDRouv > 998) {
V_LDRouv = 0;
} else {
V_LDRouv++;
}
}
if (ParaLDRferm == 3) {
if (V_LDRferm > 998) {
V_LDRferm = 0;
} else {
V_LDRferm++;
}
}
if (ParaLDRhysteresis == 3) {
if (V_Hysteresis > 998) {
V_Hysteresis = 0;
} else {
V_Hysteresis++;
}
}
if (SystReglheure == 3) {
if (V_Tsystheure > 22) {
V_Tsystheure = 0;
} else {
V_Tsystheure++;
}
}
if (SystReglheure == 5) {
if (V_Tsystminute > 58) {
V_Tsystminute = 0;
} else {
V_Tsystminute++;
}
}
if (SystReglheure == 7) {
if (V_Tsystseconde > 58) {
V_Tsystseconde = 0;
} else {
V_Tsystseconde++;
}
}
}
//Gestion Navigation Bouton Select ////////////////
void navmenuboutonselect() {
if (Accueil > 0 && Veille == 0) {
Accueil = 0; Menu = 1;
}
if (Menu == 3) {
Menu = 0; MenuMdm = 1;
}
if (Menu == 4) {
Menu = 0; MenuPara = 1;
}
if (Menu == 5) {
MenuSyst = 1; Menu = 0;
}
if (Menu == 11) {
Accueil = 1; Menu = 0;
}
if (MenuMdm == 3) {
Modedemarche = MenuMdm - 2; MenuMdm = 0; Menu = 1; Sav();
}
if (MenuMdm == 4) {
Modedemarche = MenuMdm - 2; MenuMdm = 0; Menu = 1; Sav();
}
if (MenuMdm == 5) {
Modedemarche = MenuMdm - 2;
MenuMdm = 0; Menu = 1; Sav();
}
if (MenuMdm == 11) {
MenuMdm = 0; Menu = 1;
}
if (MenuPara == 5) {
MenuPara = 0; Menu = 1;
}
if (MenuPara == 3) {
MenuPara = 0; MenuParaProg = 1;
}
if (MenuPara == 4) {
MenuPara = 0; MenuParaLDR = 1;
}
if (MenuParaLDR == 11) {
MenuParaLDR = 0; MenuPara = 1;
}
if (MenuSyst == 3) {
MenuSyst = 0; SystReglheure = 1;
}
if (MenuSyst == 4) {
MenuSyst = 0; MenuSystVeille = 1;
}
if (MenuSyst == 5) {
MenuSyst = 0; Menu = 1;
}
if (MenuSystVeille == 3) {
MenuSystVeille = 0; SystVeilleetat = 1;
}
if (MenuSystVeille == 4) {
MenuSystVeille = 0; SystVeilleTpsactiv = 1;
}
if (MenuSystVeille == 5) {
MenuSystVeille = 0; MenuSyst = 1;
}
if (SystVeilleetat == 3) {
SystVeilleetat = 0; MenuSystVeille = 1; Sav();
}
if (SystVeilleTpsactiv == 3) {
SystVeilleTpsactiv = 0; MenuSystVeille = 1; Sav();
}
if (MenuParaProg == 3) {
MenuParaProg = 0; ParaProgHouv = 1;
}
if (MenuParaProg == 4) {
MenuParaProg = 0; ParaProgHferm = 1;
}
if (MenuParaProg == 5) {
MenuParaProg = 0; MenuPara = 1;
}
if (ParaProgHouv == 3) {
ParaProgHouv = 4;
}
if (ParaProgHouv == 5) {
MenuParaProg = 1; ParaProgHouv = 0; Sav();
}
if (ParaProgHferm == 3) {
ParaProgHferm = 4;
}
if (ParaProgHferm == 5) {
MenuParaProg = 1; ParaProgHferm = 0; Sav();
}
if (MenuParaLDR == 3) {
MenuParaLDR = 0; ParaLDRouv = 1;
}
if (MenuParaLDR == 4) {
MenuParaLDR = 0; ParaLDRferm = 1;
}
if (MenuParaLDR == 5) {
MenuParaLDR = 0; ParaLDRhysteresis = 1;
}
if (ParaLDRouv == 3) {
MenuParaLDR = 1; ParaLDRouv = 0; Sav();
}
if (ParaLDRferm == 3) {
MenuParaLDR = 1; ParaLDRferm = 0; Sav();
}
if (ParaLDRhysteresis == 3) {
MenuParaLDR = 1; ParaLDRhysteresis = 0; Sav();
}
if (SystReglheure == 3) {
SystReglheure = 4;
}
if (SystReglheure == 5) {
SystReglheure = 6;
}
if (SystReglheure == 7) {
SavHeure(); SystReglheure = 0; MenuSyst = 1;
}
}
//Gestion Navigation Bouton HAUT rapide ////////////
void NavBthautrapide() {
if ((timerarduino - previousTimer6) > Timer6ON) {
if (ParaLDRouv == 3) {
if (V_LDRouv > 988) {
V_LDRouv = 0;
} else {
V_LDRouv = V_LDRouv + 10;
}
}
if (ParaLDRferm == 3) {
if (V_LDRferm > 988) {
V_LDRferm = 0;
} else {
V_LDRferm = V_LDRferm + 10;
}
}
if (ParaLDRhysteresis == 3) {
if (V_Hysteresis > 988) {
V_Hysteresis = 0;
} else {
V_Hysteresis = V_Hysteresis + 10;
}
}
if (SystVeilleTpsactiv == 3) {
if (V_TpsAvveille > 169) {
V_TpsAvveille = 3;
} else {
V_TpsAvveille = V_TpsAvveille + 10;
}
}
previousTimer6 = timerarduino;
}
}
//Gestion Navigation Bouton BAS rapide ////////////
void NavBtbasrapide() {
if ((timerarduino - previousTimer6) > Timer6ON) {
if (ParaLDRouv == 3) {
if (V_LDRouv < 11) {
V_LDRouv = 999;
} else {
V_LDRouv = V_LDRouv - 10;
}
}
if (ParaLDRferm == 3) {
if (V_LDRferm < 11) {
V_LDRferm = 999;
} else {
V_LDRferm = V_LDRferm - 10;
}
}
if (ParaLDRhysteresis == 3) {
if (V_Hysteresis < 11) {
V_Hysteresis = 999;
} else {
V_Hysteresis = V_Hysteresis - 10;
}
}
if (SystVeilleTpsactiv == 3) {
if (V_TpsAvveille < 14) {
V_TpsAvveille = 180;
} else {
V_TpsAvveille = V_TpsAvveille - 10;
}
}
previousTimer6 = timerarduino;
}
}
void Intro() {
lcd.home();
lcd.setCursor(1, 0); lcd.write(1);
lcd.setCursor(2, 0); lcd.write(2);
lcd.setCursor(1, 1); lcd.write(3);
lcd.setCursor(2, 1); lcd.write(4);
lcd.setCursor(6, 0); lcd.print("DomoPoule");
lcd.setCursor(5, 1); lcd.print("Version.5-A");
lcd.setCursor(0, 3); lcd.print(" www.robdomo.com ");
delay(2000);
}
//Gestion Mise en veille Ecran/////////////////////
void EcrVeille() {
Timer4ON = V_TpsAvveille * 1000;
if (((timerarduino - previousTimer4) > Timer4ON) && Accueil == 7 && Etatveille == 1) {
lcd.noBacklight(); Veille = 1;
}
if (EtatBtselect == 1 || EtatBthaut == 1 || EtatBtbas == 1 || Accueil != 7) {
lcd.backlight(); previousTimer4 = timerarduino;
Veille = 0;
}
}
Nombre de vues: 5 646




Merci beaucoup pour ton travail, c’est clair efficace et professionnel! Du coup, je commande les pièces et je vais me lancer… Je reviendrai probablement par ici parce que je débute et je pressens que tout ne sera pas simple…
Pour commencer, je pense que j’alimenterai mon système via une pile 9v standard (et pas une alim 12v), cela devrait fonctionner malgré tout? Et ensuite, si je parviens à tout faire fonctionner le mettrai un panneau solaire pour le rendre autonome complètement..
Merci encore
Bonjour,
Le système et prévu pour fonctionner plutôt avec une alimentation permanente du secteur.
La pile 9 v ne va malheureusement pas durer longtemps à mon avis
Cordialement,
Bonjour
je m’éclate a tester toutes vos vidéos, j’ai un soucis sur la dernière version 5A
j’ai une déférence sur la carte horloge j’ai une DS 3231
malheureusement je suis bloqué sur le contrôle du code avec le logiciel Arduino
Avez-vous testé avec une carte DS 3231 ?
Cordialement Christophe
Bonjour,
Pour faire fonctionner avec DS3231, il faut modifier le code en fonction de votre horloge.
Malheureusement, je n’en ai pas pour vous faire un exemple.
Cordialement
bonjour et merci pour tout quel poids peut soulevé le moteur pas à pas
j’ai tout les éléments de la liste
je vais essaye de faire pareil
Bonjour,
Le poids que va soulever le Nema va dépendre de ces caractéristiques
Le plus simple et d’essayé si vous avez le matériel ou de se référencer à la documentation
Cordialement,
Merci pour ton travail. J’ai réalisé le montage ça fonctionne super! Seul bémol j’ai du ajouter un réducteur au moteur nema que j’ai imprimé en 3D. J’ai aussi eut plusieurs problèmes avec la porte qui se fermait mal et le moteur continuait à tourner. Peut être pourrais tu intégrer quelques lignes de code pour afficher une erreur quand le moteur tourne plus de X secondes sans arriver en fin de course.
Cordialement
Bonjour,
Effectivement, l’ajout d’un réducteur est l’idéal.
Pour le reste, je prévois de faire une autre version pour sécuriser la porte en cas de problème à l’ouverture ou autre, mais actuellement, je manque de temps.
Je vais reprendre les projets qu’à partir de début de l’année prochaine où j’aurais plus de temps libre.
Cordialement,
Bonjour,
J’ai découvert votre site via une vidéos youtube et je vais donc m’inspirer de votre travail pour reproduire ce système d’ouverture de porte pour mes cocottes 🙂
Un grand merci pour votre travail et votre partage en espérant que je me débrouillerai lorsque j’aurai reçu mes composants 🙂
Au pire, j’appellerai à l’aide lol
Cordialement,
Merci
Je vous souhaite bon courage pour le montage.
Normalement, il a été déjà utilisé par de nombreuses personne donc cela devrait fonctionner.
Cordialement,
bonjour, quand je test le programme j’ai ce message d’erreur :
Porte_automatique_pour_poulailler_version_5-A:2:10: fatal error: DS1302.h: No such file or directory
#include
^~~~~~~~~~
compilation terminated.
exit status 1
DS1302.h: No such file or directory
une idée pour régler le problème ?
en tout cas super boulot
Bonjour,
Vous avez dû oublier d’ajouter la bibliothèque DS1302 à l’IDE arduino
Elle est disponible en téléchargement.
Cordialement,
Bonsoir,
je pense me lancer merci pour votre video et tuto.
Quel moteur me conseillez vous ? Où l’acheter. Merci .
Bonjour merci du retour
Je vous conseille un moteur PAP équipé d’un petit réducteur à l’arrière qui servira de frein par contrainte mécanique à l’arrêt.
Moi, je me fournis principalement du coté EST de la terre.
Cordialement,
Bonjour,
Un grand merci pour votre travail!
Le montage fonctionne parfaitement sur ma breadbord. Je suis maintenant en train de regarder pour adapter le montage sur un beau PCB.
Il est vrai que je serai également fortement intéressé par une sécurité au cas où la porte bloquerait sur quelque chose ou si un des fin de course serait défectueux.
Mais c’est déjà super, plus besoin de sortir fermer la trappe des poules en fin de journée 😉
Merci Steven
Cordialement
Raphaël
bonjour
serait il possible de voir le tout assemblé ? et savoir dans quoi vous l’avez mis pour son fonctionnement ?
je suis tres interessé mais je n’arrive pas a voir l’encombrement total dde l’affaire une fois finie
Bonjour Eric,
Pour optimiser le coup du projet final Amazon n’est pas le meilleur moyen de faire baisser la facture.
La plupart des pièces sont importées direct de l’étranger où vous pourrez les retrouver à moindre coup.
Je ne vais pas pouvoir vous montrer le résultat final, car je n’ai malheureusement pas de poule j’ai juste effectué le montage et le codage pour des internautes qui me l’on demander.
Cordialement.
l’addition des pièces arrive a un total de 110€ (avec remise Amazon)(+15Breadboard Kit Jumper que je n’ai pas) et avec une alim 220V qui serait sans doute mieux en photovoltaïque mais qui alourdirait sans doute la facture ..
Je suis un peu perdu, l’idée me semblait super bonne, mais le modèle économique me dépasse, comment est ce possible ?
Bonjour,
Peut-on imaginer un mode mixte avec ouverture à heure déterminée et fermeture sur luminosité déclinante ?!
Nous avons un coq et aimerions qu’il ne chante pas trop tôt, et donc programmer l’ouverture pour 9h, bien après le levé du soleil.
Par contre, la porte doit se fermer au coucher au risque d’enfermer les gallinacés dehors :/
Merci !
Bonjour,
Oui, cette version est disponible dans la version 6
Cordialement,