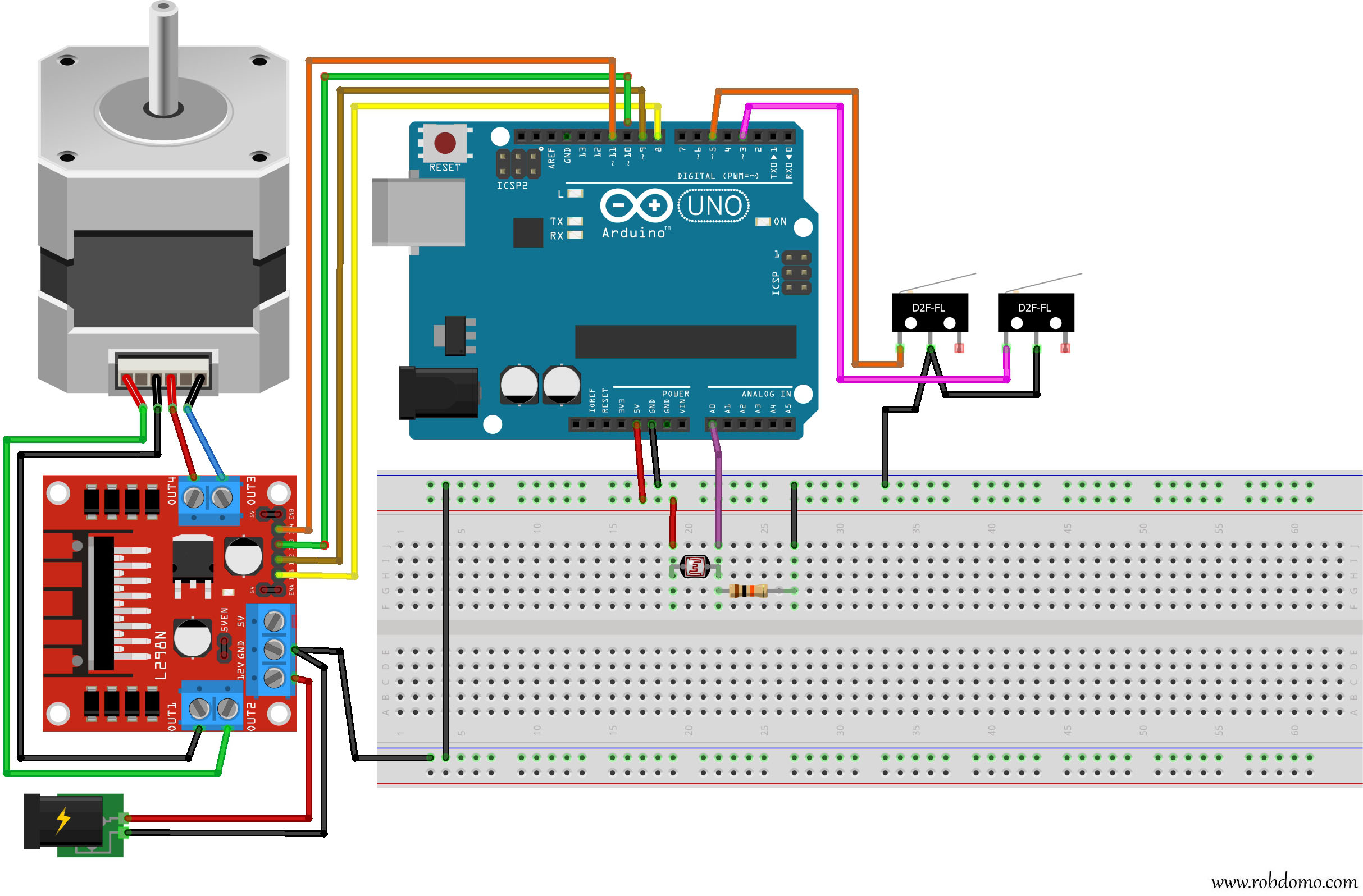
#include <Stepper.h> const int stepsPerRevolution = 200; // Initialise le moteur sur les broches 8 à 11 Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
const int LDR = A0; // broche du LDR const int fdchaut = 3; // broche du fin de course haut const int fdcbas = 5; // broche du fin de course bas int etatporte = 0; int val_LDR_ouverture = 400; // valeur luminosité minimum pour ouverture int val_LDR_fermeture = 100; // valeur luminosité minimum pour fermeture
void setup() { myStepper.setSpeed(200); //Vitesse de rotation du moteur à 200 pinMode(fdchaut, INPUT_PULLUP); pinMode(fdcbas, INPUT_PULLUP); Serial.begin(9600); }