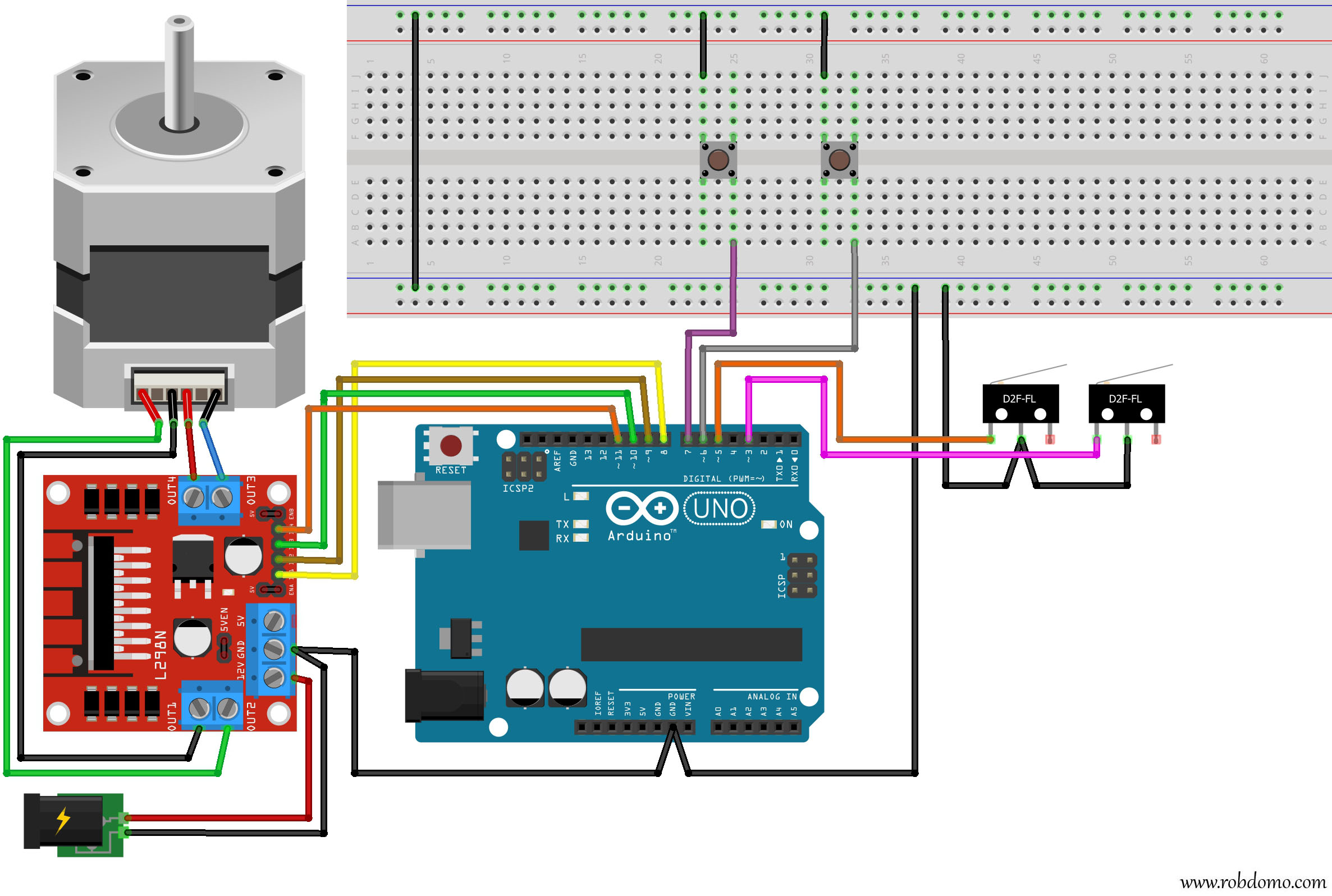
#include <Stepper.h> const int stepsPerRevolution = 200; // Initialise le moteur sur les broches 8 à 11 Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
const int btmonter = 6; // broche du bouton monter const int btdescente = 7; // broche du bouton descendre const int fdchaut = 3; // broche du fin de course haut const int fdcbas = 5; // broche du fin de course bas
void setup() { myStepper.setSpeed(200); //Vitesse de rotation du moteur à 200 pinMode(btmonter, INPUT_PULLUP); pinMode(btdescente, INPUT_PULLUP); pinMode(fdchaut, INPUT_PULLUP); pinMode(fdcbas, INPUT_PULLUP);
Toujours un régale de parcourir tout tes projets dont la plupart m’inspirent !
Une question tout de même;
Tu utilises un PCB en L298 , pourquoi pas un stepper driver polulu commandé en DIR / Step ?
A cause de la puissance , du code qui serait trop compliqué ?
Merci d’avance !





Bonjour ,
Toujours un régale de parcourir tout tes projets dont la plupart m’inspirent !
Une question tout de même;
Tu utilises un PCB en L298 , pourquoi pas un stepper driver polulu commandé en DIR / Step ?
A cause de la puissance , du code qui serait trop compliqué ?
Merci d’avance !
Bonjour merci du retour
J’utilise un L298N car j’ai ça sous la main ^^
Il me fournit aussi un 5v pour l’Arduino
Cordialement,