Dernière modification de la publication :mars 12, 2022
Temps de lecture :3 min de lecture
Variation signal celons la distance exemple radar de recul HC SR04 + Led + Arduino nano *
Prérequis :
Matériel :
1 x Carte Arduino Nano
1 x Led
1 x Résistance 220 ohms
1 x HC-SR04 capteur à Ultrason
1 Buzzer
Fils de connexion
1 x Breadboard
Vidéo de démonstration :
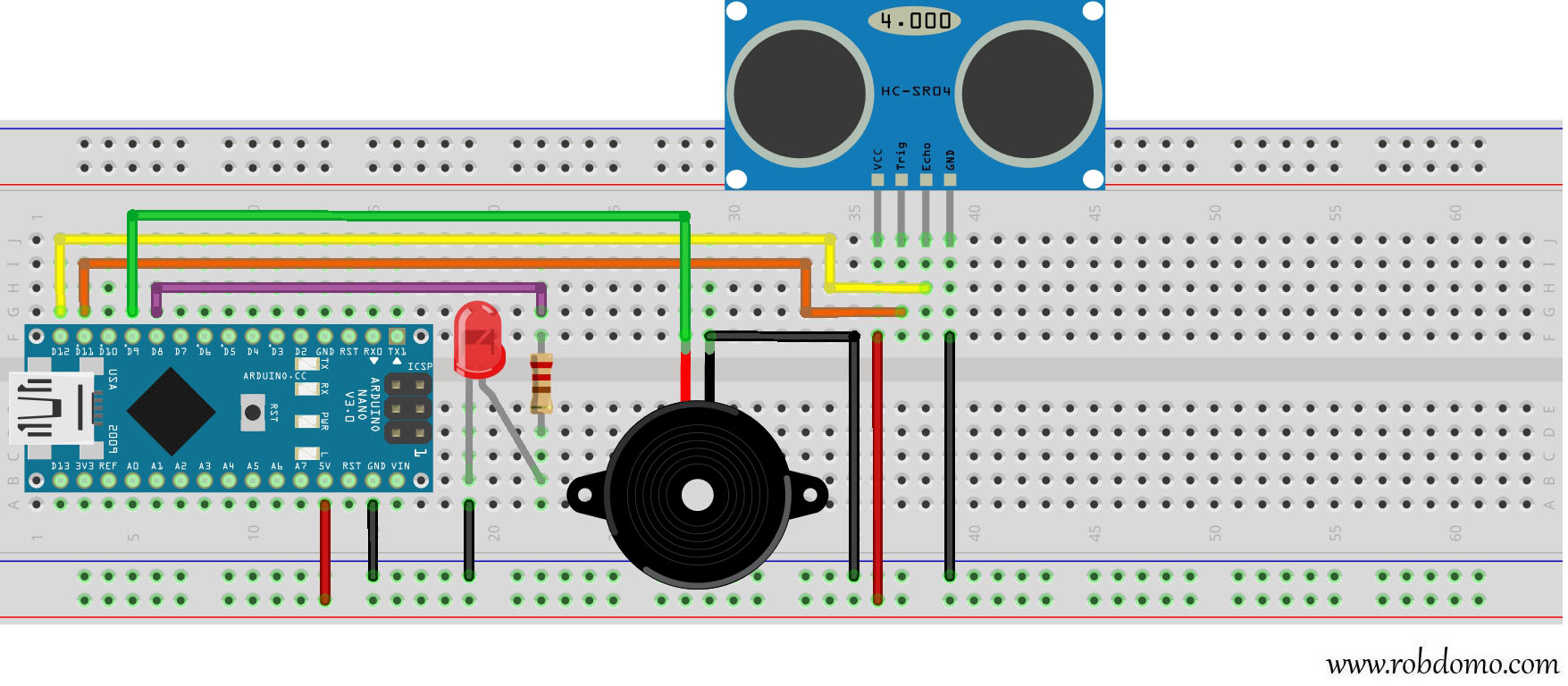
Schéma de câblage :
Code :
const int trigPin = 11; //Trig HC SR04 connectés sur PIN11 const int echoPin = 12; //Echo HC SR04 connectés sur PIN11 const int Led = 8; //LED connectée sur PIN8 const int Buzzer = 9; //Buzzer connecté sur PIN9 int distanceDds = 13; // Distance début signalement (nombre entier en cm) int distanceDsc = 4; // Distance signalement continu (nombre entier en cm) float duration; int distance; unsigned long currentTime = 0; unsigned long previousTime = 0; boolean etatSignal;