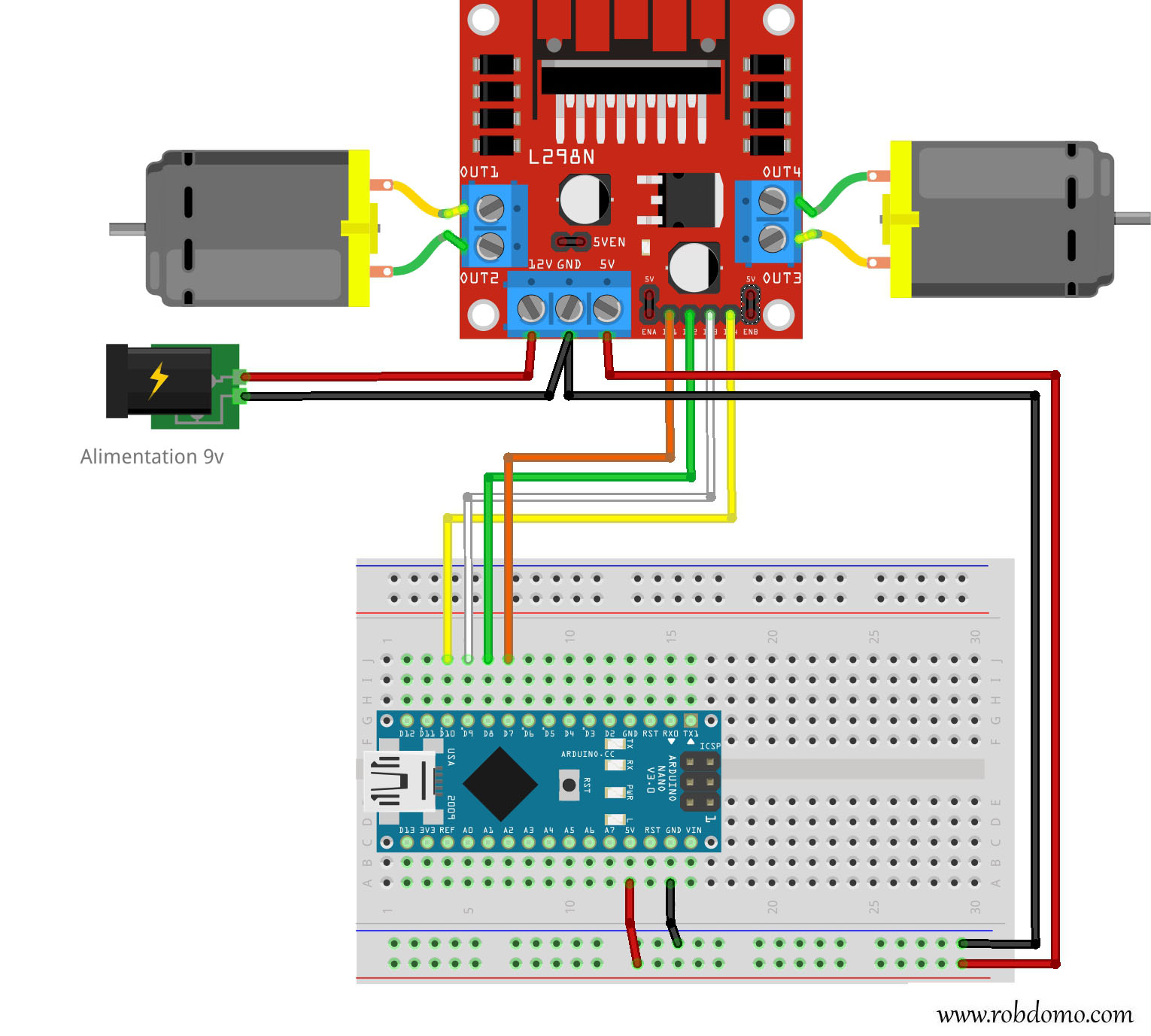
#define borneIN1 7 // On branche "IN1" du L298N à la pin D7 de l'arduino #define borneIN2 8 // On branche "IN2" du L298N à la pin D8 de l'arduino #define borneIN3 9 // On branche "IN3" du L298N à la pin D9 de l'arduino #define borneIN4 10 // On branche "IN4" du L298N à la pin D10 de l'arduino
void setup() {
// Déclaration des pins de l'Arduino en "sortie" pinMode(borneIN1, OUTPUT); pinMode(borneIN2, OUTPUT); pinMode(borneIN3, OUTPUT); pinMode(borneIN4, OUTPUT); }