Salut, j’ai testé le fonctionnement des moteurs pas a pas.
j’envoyais des ordre simple de positionnement aux moteurs
et a un moment ca c’est arrêté et depuis plus aucun moteurs ne bouge.
est ce que la puissance des moteurs MG996R peut endommager une carte arduino 328 plus ou la sortie usb de mon pc portable?
merci d’avance
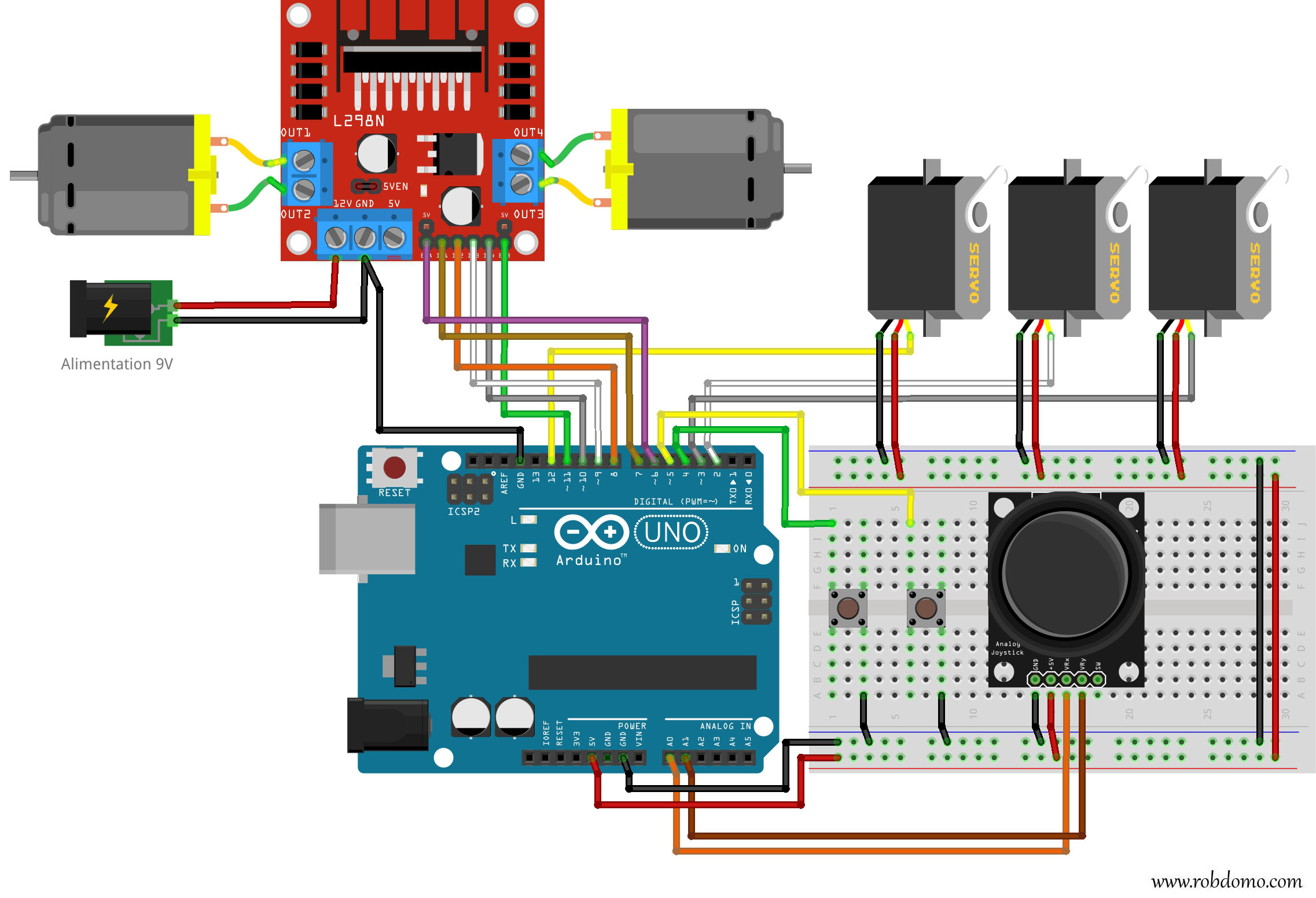
Pour ce type de montage, il est parfois préférable d’utiliser une source de courant externe 5 V, car en effet, les MG995R consomment pas mal d’intensité par rapport à ce que peut fournir la carte.
Pour votre carte et votre pc je ne peux pas vous répondre, il va falloir essayer de faire le diagnostic vous-même.
Pour la prise USB de votre Pc, vous vous pouvez essayer de brancher simplement un câble de téléphone et voir s’il charge.



Salut, j’ai testé le fonctionnement des moteurs pas a pas.
j’envoyais des ordre simple de positionnement aux moteurs
et a un moment ca c’est arrêté et depuis plus aucun moteurs ne bouge.
est ce que la puissance des moteurs MG996R peut endommager une carte arduino 328 plus ou la sortie usb de mon pc portable?
merci d’avance
Bonjour,
Pour ce type de montage, il est parfois préférable d’utiliser une source de courant externe 5 V, car en effet, les MG995R consomment pas mal d’intensité par rapport à ce que peut fournir la carte.
Pour votre carte et votre pc je ne peux pas vous répondre, il va falloir essayer de faire le diagnostic vous-même.
Pour la prise USB de votre Pc, vous vous pouvez essayer de brancher simplement un câble de téléphone et voir s’il charge.
Cordialement,